Designing intelligent autonomous robot using the SLAM algorithm, RRT* algorithm, and Fuzzy-PID techniques
During my last years at Hanoi University of Science and Technology, I researched motion planning for autonomous mobile robots integrated with SLAM, RRT* algorithm, and Fuzzy-PID control techniques, aiming to create a robust and intelligent robot capable of autonomous navigation in an environment with obstacles.
Problem statements:
- Making path planner for RRT* algorithm.
- Bulding a mobile robot prototype which can navigate in obstacle region.
Images and Results:
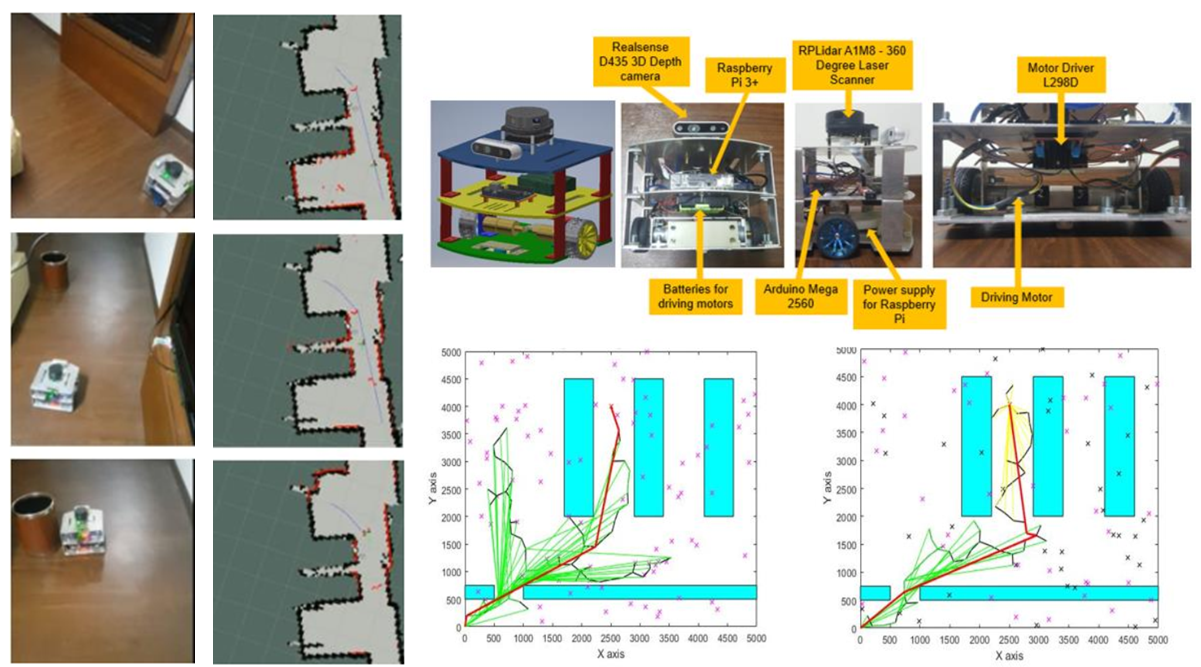
Robot design and its planning algorithm in simulation.
Obstacle avoidance for both static and dynamic obstacles in simulation.
Obstacle avoidance in real-life using RRT* as the path planner.

The project was done by a group of 3 students and guided by Professor Mac Thi Thoa. We got 2nd prize in Student Research Competition at HUST (2019)
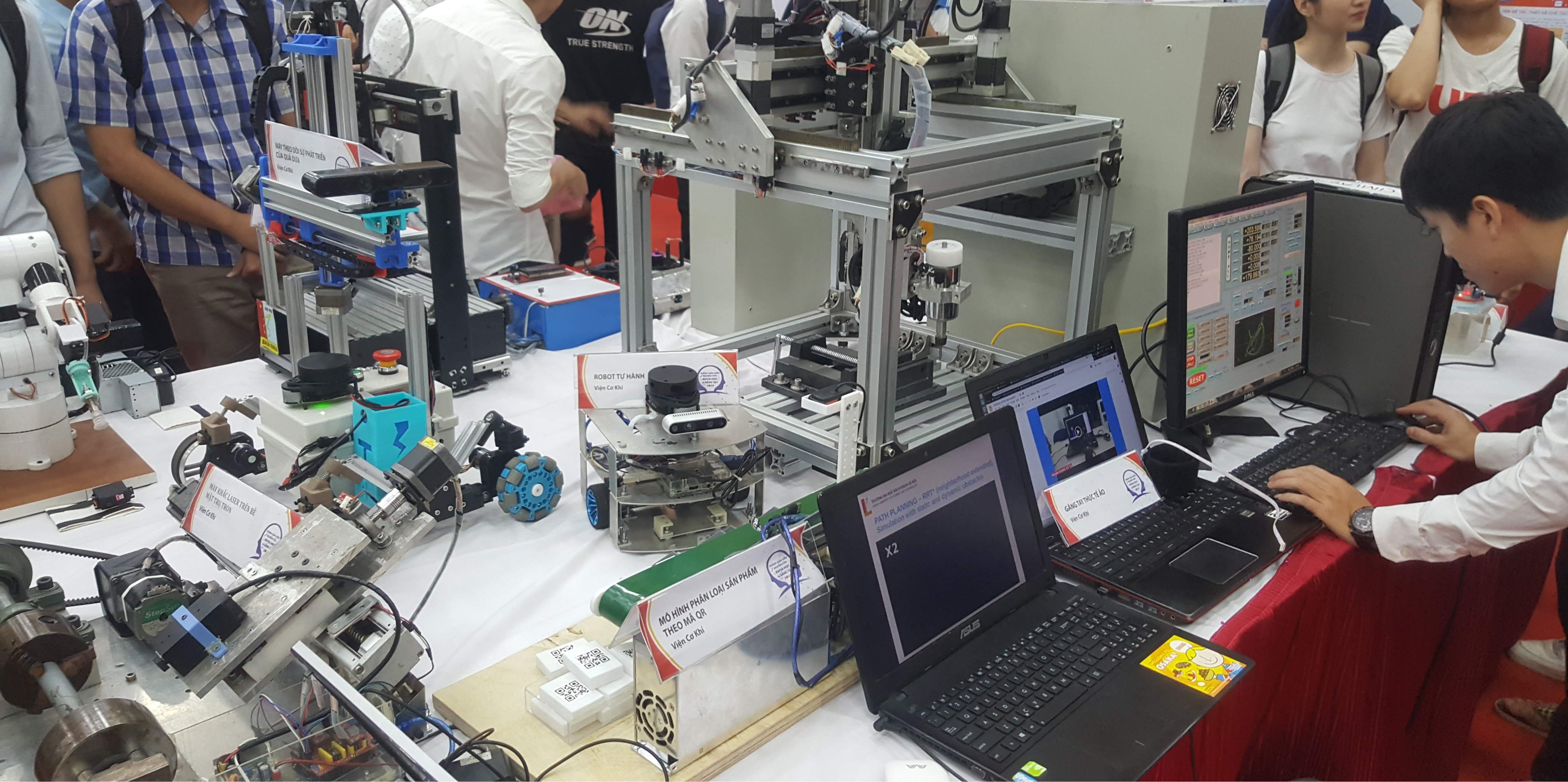
Our robot was presented in Student Research Competition at HUST (2019).
Additional Information:
Location: Hanoi University of Science and Technology, Vietnam.
Date: From 2018 to 2019.
Context: This is my bachelor’s graduation thesis at Hanoi University of Science and Technology.
Publication: Mac et al. (2021).