Navigation of Automatic Guided Vehicles (AGV) using multiple vision-based algorithms
During my internship at National Taiwan University of Science and Technology (NTUST) in March - May 2019, I was part of the team responsible for designing an analog control system for an Automated Guided Vehicle (AGV) that could operate efficiently in industrial environments. Using CAN-bus technology, we were able to create a system that allowed for seamless communication between the AGV and its surrounding environment. This project was completed in collaboration with UBIQELIFE Technology Corporation.
Problem statements:
- Testing and intergrating vision-based sensor for AGV.
- Setup CAN-bus for the AGV.
Images and Results:
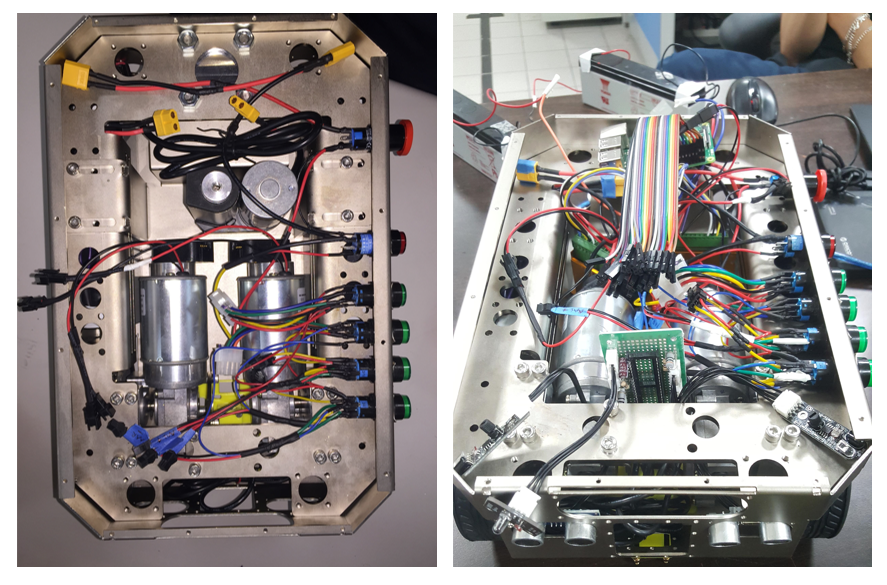
AGV prototypes were being assembled for testing with CAN bus, ultrasonic sensors, and cameras.

Me at National Taiwan University of Science and Technology.
Additional Information:
Location: Advanced Intelligent Robot Lab, National Taiwan University of Science and Technology, Taiwan.
Date: From 2019 March to 2019 May.
Context: This internship worked as a part of my bachelor’s graduation thesis at Hanoi University of Science and Technology.
Publication: Mac et al. (2021).