Surpassing Natural Experts in Odor Source Localization Through Inverse Reinforcement Learning
I am using deep inverse reinforcement learning to learn the odor search strategy of the silkworm moth in nature and export a reward function from it to apply to the autonomous mobile robot for safety and rescue tasks.
Problem statements:
- Finding gas source in obstacle region.
- Learning from natural expert which is silkworm moth.
Images and Results:
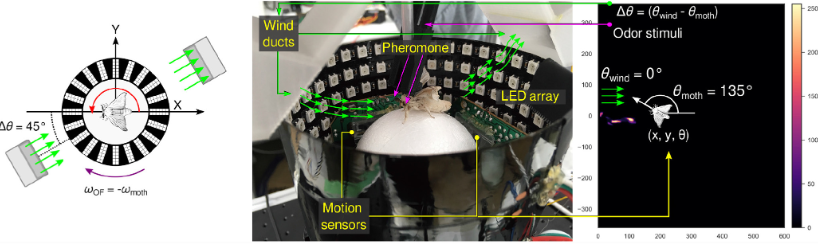
VRmoth system for obtaining silkworrm moth behavior
Additional Information:
Location: Kurabayashi Laboratory, Tokyo Institute of Technology, Japan.
Date: From 2022 October to 2025 September.
Context: This is my PhD Dissertation at Institute of Science Tokyo.
Publications: Hernandez-Reyes et al. (2022).